
FigureRoboticsVLAModel
HELIX02
从半身控制到全身连续动作;从简单操作到长达4分钟自主执行;删掉近11万行代码,直接1000小时真人动作训练......这,就是Figure在几小时前刚刚发布的全新VLA模型——Helix02!
去年,Figure公司正式发布Helix,展示了单个神经网络如何通过像素控制人形机器人的上半身。如今,Helix02将这种控制扩展到整个机器人——行走、操作和平衡作为一个连续的系统完成。
先看长达4分钟自主任务原声视频没有任何杂乱的背景乐干扰
以下我们通过10大关键要点,用通俗易懂的方式来理解Helix02所带来的进化!
01
全身大统一:从“上半身”到“全家桶”
去年Helix只能控制机器人的上半身,而Helix02实现了全身统一控制。现在,机器人走路、拿东西、保持平衡不再是分开的指令,而是一个神经网络同时管全身。这意味着它在走路的同时可以伸手拿杯子,动作像人一样连贯自然。

几十年来,行走与操作一体化一直是机器人领域最难的未解难题之一。难点不在于“行走”或“操作”单独实现,而在于两者持续耦合——拿起物体会改变重心;迈步会改变手的可达范围;手臂与腿部持续相互约束。真正的自主性需要根本不同的方式:单一学习系统同时理解全身。持续感知、决策与行动——边走边拿、边伸手边平衡、实时纠错。这正是Helix02的目标。
02
四分钟“超长待机”自主完成任务
这是一个重大的成果:Figure机器人自主完成了长达4分钟的家务任务(洗碗、收纳、跨房间行走)。中间不需要人类干预,也不需要“暂停思考”。Figure公司认为这是迄今类人机器人完成的最长时序、最复杂的完全自主任务。61个连续行走-操作动作,具备隐式错误恢复。

03
System0:抛弃了10万行代码
以前控制机器人平衡需要工程师写极其复杂的C++代码。Helix02引入了System0,这是一个通过1000小时真人动作数据训练出来的“运动本能”。它直接取代了10.9万行手动代码,让机器人的动作从“机械感”变成了“肌肉记忆”。
S0是基于人类数据的全身控制基础模型,负责每个动作稳定、安全、自然执行。不再为走路、转身、蹲下、伸手分别设计奖励函数,S0直接从大量人类运动数据中学习全身协调规律。
04
学会了“用屁股顶门,用脚抬门”
整段视频中最出彩的部分:当机器人双手拿满东西时,它会自发地用臀部去顶关抽屉,或者用脚去关洗碗机的门。这说明它不再死板地认为“只有手能干活”,而是把整个身体都当成了工具,这种灵活性是具身智能极高的表现。
05
真正的一体化“移动操控”
这是一个机器人界的难题:一边走一边干活。Helix02解决了这个痛点:它能一边拎着易碎品走路,一边稳稳地保持平衡,不再需要“走一步停一下再抓取”。

06
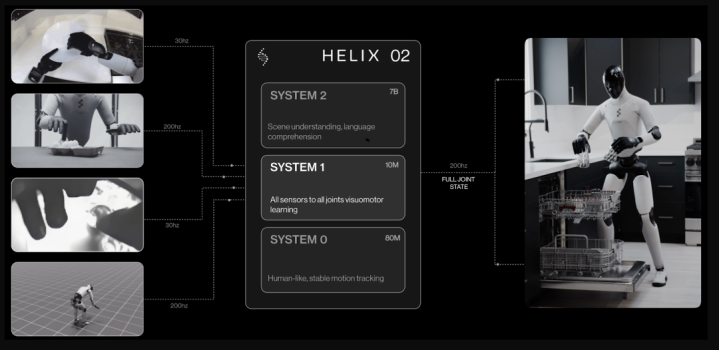
所有的传感器都连上了!
Helix02实现了“全传感器输入,全关节输出”。它把头部的视觉、手掌的摄像头、手指的触觉以及全身的关节状态全部接入同一个神经网络。就像人的大脑同时处理视觉和触觉一样,它能根据手感直接调整抓取力道。
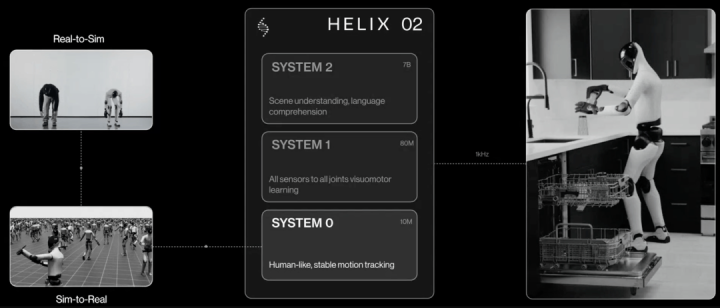
原Helix仅控制上半身。Helix02中,S1连接所有传感器并控制整个身体。输入:头部摄像头、手掌摄像头、指尖触觉、本体感知。输出:腿、躯干、头、双臂、手腕、手指的完整关节控制。这使S1能将机器人整体与环境视为单一耦合系统。S1仍为Transformer,并受S2语义潜变量调控,输出全身动作目标,由S0以kHz级跟踪执行。System2负责场景理解与语言推理。
07
手掌里的“第三只眼”
Figure03机器人在手掌上增加了摄像头。这解决了一个大问题:当机器人抓东西时,头部的相机往往会被手臂遮挡(自遮挡)。有了手掌相机,它能“近距离”看清物体,甚至能从杂乱的盒子里精准拣选出极小的零件。
08
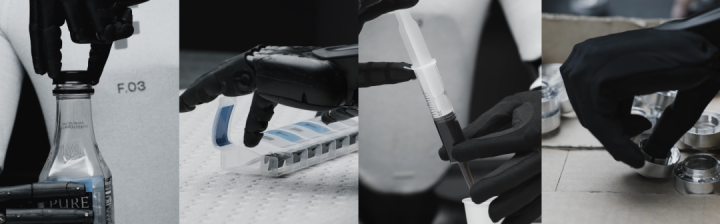
像人手一样敏感的“触觉”
机器人的手指现在极其灵敏,能感知到低至3克(相当于一个回形针)的压力。这让它能完成一些“绣花活”,比如:旋开细小的瓶盖;从药盒里捏起一颗药丸;精准地推入5毫升的注射器。

09
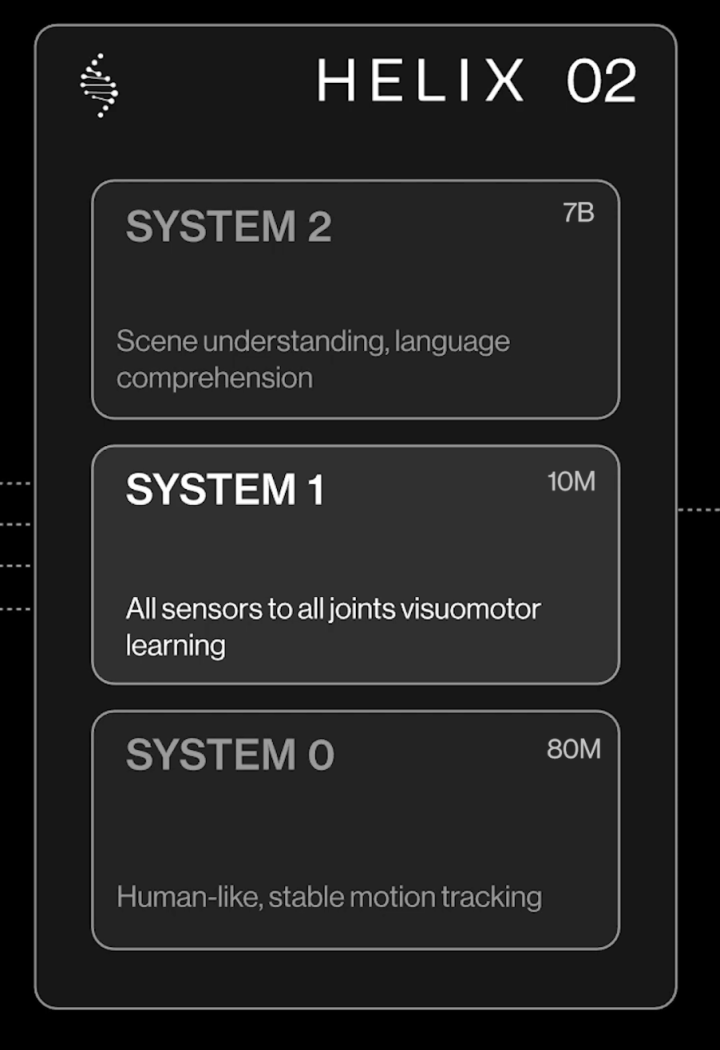
三层大脑架构(S0,S1,S2)
Helix02采用了一个高效的层级结构:
System2(高层决策):负责听懂指令(如“把碗收了”)。
System1(运动规划):负责看图像、算路径。
System0(底层反射):负责以1000Hz的频率极速维持平衡,就像人的植物神经。
10
“仿真到现实”的完美迁移
所有的训练都是在虚拟仿真环境(Simulation)中完成的。Figure使用了20万个并行环境进行大规模训练,这让Helix02具有极强的通用性,学到的技能可以直接“下载”到实体机器人身上,并适应真实世界中各种乱七八糟的环境。

总结:Helix02的意义
Helix02证明了人形机器人正在从“实验室的昂贵玩具”进化为“能干重活、长活的劳动力”。它不再是靠死板的程序运行,而是拥有了类似人类的运动本能和环境感知力。成果虽仍是早期阶段,但已经展示了以下三大重要能力:
▹4分钟、61个连续动作的全身自主任务
▹触觉与手内视觉支持的高灵巧操作
▹髋部、脚与手协同的全身协调
Figure公司期待随着规模继续扩展,让通用类人机器人真正走入家庭与全球劳动力市场。